SLAM
Monocular Visual Simultaneous Localization and Mapping
The following terms are frequently used in this example:
- Key Frames: A subset of video frames that contain cues for localization and tracking. Two consecutive key frames usually involve sufficient visual change.
- Map Points: A list of 3-D points that represent the map of the environment reconstructed from the key frames.
- Covisibility Graph: A graph consisting of key frame as nodes. Two key frames are connected by an edge if they share common map points. The weight of an edge is the number of shared map points.
- Essential Graph: A subgraph of covisibility graph containing only edges with high weight, i.e. more shared map points.
- Place Recognition Database: A database used to recognize whether a place has been visited in the past. The database stores the visual word-to-image mapping based on the input bag of features. It is used to search for an image that is visually similar to a query image.
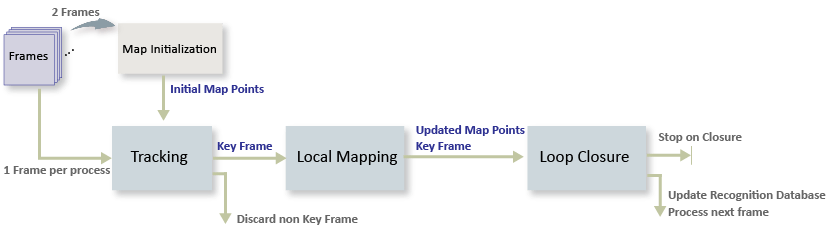
The ORB-SLAM pipeline includes:
- Map Initialization: ORB-SLAM starts by initializing the map of 3-D points from two video frames. The 3-D points and relative camera pose are computed using triangulation based on 2-D ORB feature correspondences.
- Tracking: Once a map is initialized, for each new frame, the camera pose is estimated by matching features in the current frame to features in the last key frame. The estimated camera pose is refined by tracking the local map.
- Local Mapping: The current frame is used to create new 3-D map points if it is identified as a key frame. At this stage, bundle adjustment is used to minimize reprojection errors by adjusting the camera pose and 3-D points.
- Loop Closure: Loops are detected for each key frame by comparing it against all previous key frames using the bag-of-features approach. Once a loop closure is detected, the pose graph is optimized to refine the camera poses of all the key frames.
https://www.mathworks.com/help/vision/ug/monocular-visual-simultaneous-localization-and-mapping.html
#slam #visual #detection #navigation #localization #perception